top of page
Postdoctoral Fellow
Intuitive Computing Laboratory &
Malone Center for Engineering in Healthcare
Computer Science, Johns Hopkins University
Email: tlin63 [at] jhu [dot] edu
















產品照!!

HipAD
產品照!!
1/2
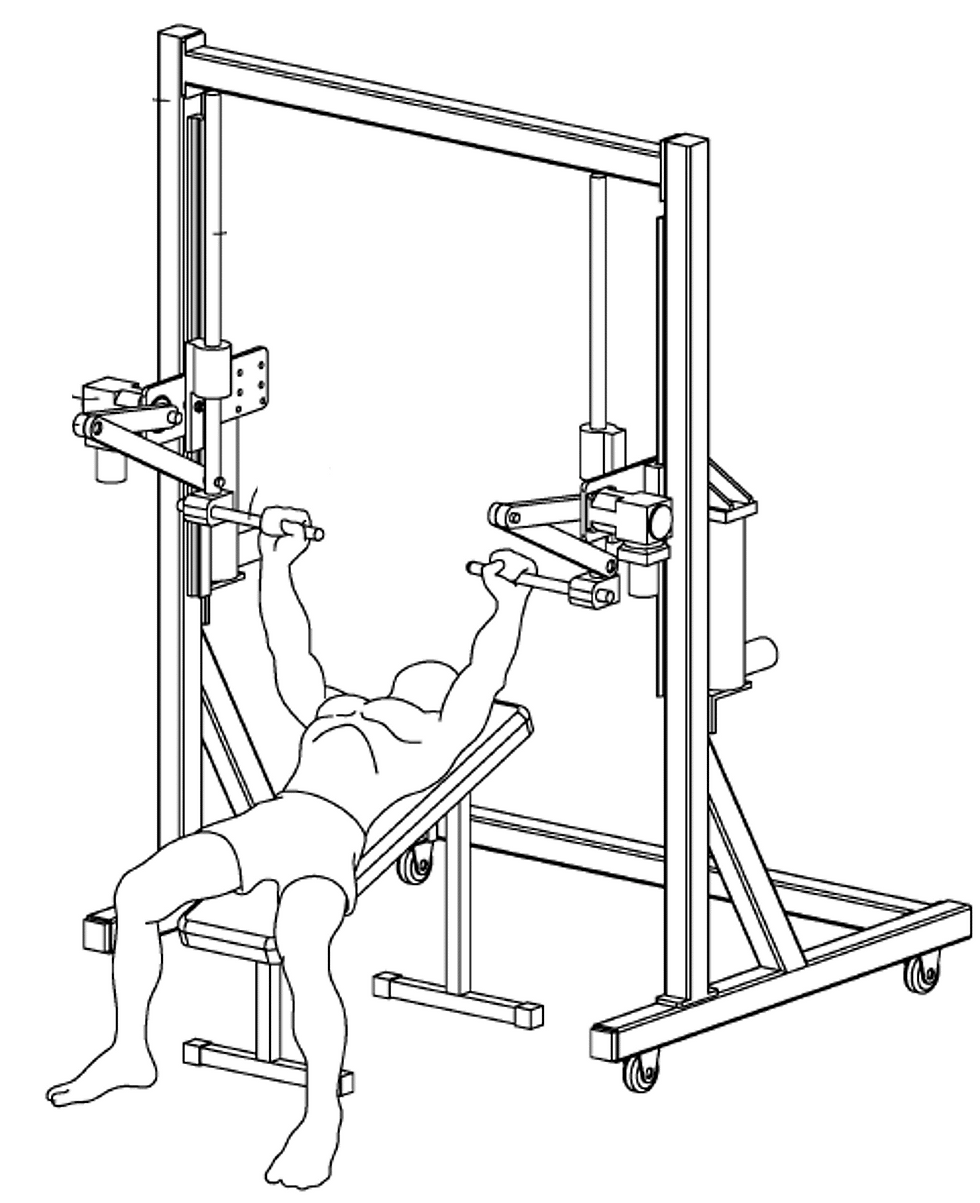
WALKING ASSIST DEVICE
Developed hip joint assist device to help elder people walk easily since their weaken lower limbs muscle. Moreover, assist device also able to help labor person to release their pressure of lower back during a tough working situation.

3-9

2-7

2-2
3-9
1/3
FINITE ELEMENT ANALYSIS OF KNEE LIGAMENTS
Estimated the performance of knee ligaments during cycling by combining MRI, CT image to build the knee model, motion analysis and fluoroscopy image to obtain boundary condition and in vitro knee robotic experiment to validate.

圖片1

FEM
圖片1
1/2
Human FEA in the Supine Position
Built a three-dimensional human whole-body finite element model and adjustable material parameters bed model to analysis the spine curve variation during different posture of lying. And create the more suitable bed for people.

圖片1

scapular-04
圖片1
1/2
EVALUATION ON CLAVICLE FRACTURE
Aiming to investigate the effects of recovery from clavicle fracture on functional kinematics evaluation after conservative and surgical treatments. Three-dimensional motion analysis quantified the kinematic parameters during functional movements of the shoulder complex.



圖片1

圖片3

圖片2
圖片1
1/3
BIOMECHANICS OF HAND - CYCLING
Investigated the kinematics, kinetics and fatigue effects of using a hand-cycling for long period. Using biomechanics and human movement analysis to estimate the upper limbs under different conditions and influence of extended riding on muscle fatigue endurance.

1

2

5
1
1/3
MODEL OF
GREEN PAVILION
Built the concept and model of combining solar energy, digital communication, and plastic arts into the arbor. Using solar tract mechanism to maximize the efficiency of absorbing. The outside set up with rotational LED wall to adjust by the illuminate of sunlight to save the energy consumption.
bottom of page