top of page
Motion and Gait Analysis

Gait Analysis When Spinal Core Injured(SCI) Patient Using Exoskeleton Robot During Walking
I totally responsible for the motion and gait analysis of our exoskeleton robot during walking. Including built a gait laboratory, designed testing protocol, motion data collection and developed analysis algorithm. I conducted all processes of motion analysis based on knowledge learned from Orthopaedic Engineering and Movement Analysis Lab.
Gait Laboratory Setup
The gait laboratory including motion capture system to measure the kinematics and kinetics of the subjects and suspension system for ensuring safety concern. Using ultra-high-resolution infrared video cameras(8 Vicon Bonita, Vicon Nexus 2.1)(Fig. 1) to record the trajectories of each reflection markers on human segments, force plate(4 AMTI BP400600-2000, Newton, MA, U.S.A)(Fig. 2) for measuring ground reaction force during activities and electromyography(EMG) to realize particular muscle contribution during functional movements.

Figure 1. Vicon Bonita

Figure 2. AMTI Force Plate
Before starting motion capture, cameras position and force plates orientation need to be determined. For making sure that all reflection markers able to be detected by at least three cameras to reconstruct three-dimensional trajectory, the optimization of the camera's position in circle arrangement(Fig. 3) was the best option. According to numerous functional activities we need to estimate, I placed the four force plates in the shape as shown in Fig. 4 that able to record walk, sit-to-stand, stand-to-sit and climb stairs motion. Then we start the motion capture in calibration the system(Fig. 5).
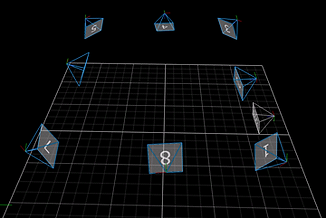
Figure 3. Camera Position
Arrangement
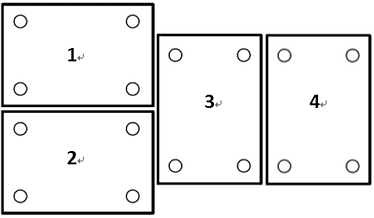

Figure 4. Force Plates Orientation
Figure 5. System Calibration
Markers Setting
In order to calculate the kinematics of the subjects, we have to separate the whole body into several different segments. Since the motion analysis of exoskeleton robot focus on lower limb movements, I developed the definition of lower limbs marker set not only for human(Fig. 6) but also for exoskeleton robot.


Figure 6. Human Lower Limbs Marker Set
Result and Discussion
Center of mass(COM) & Center of pressure(COP)
The center of mass was the important indicator that helps us realize the stability of movement. The COM in view of the frontal plane boundary in 4 x 2 centimeters rectangular area for normal people during level walking. The result of COM analysis of spinal core injured patient wearing exoskeleton robot during walking was at the larger side of horizontal length about 18 centimeters, but the vertical length was no different to the normal people. It indicated that the stability alone left-and-right was in unstable condition while walking and help us to understand that we have to redesign the strategy of the ankle joint to enhance the balance of the exoskeleton robot.
We used the center of pressure to evaluate the ability of balance during walking that was the crucial information for motion analysis system. The result of COP analysis of spinal core injured patient wearing exoskeleton robot to walk in two steps that the patient tends to load in the right side. It showed that we have to plan the new training protocol about how to equally use your left and right arm for the patient before they use the exoskeleton robot.
Combined the information of COM and COP to figure out whether the patient complete the step or not. If the COM still backward to the COP during walking, the patient may be in danger. The result as shown in Fig. 7 that the initiate of walking was unstable but after more steps it became stabilization. It reminded us to develop the mechanism that it should be in the certain condition that exoskeleton robot will begin the movement.
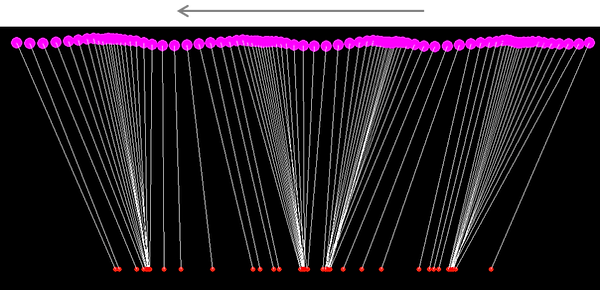
Walk Direction (Four steps)
Figure 7. COM&COP Relationship In Sagittal Plane
Relationship of clutches, Steps and COM
Built a model to estimate the relationship of clutches, steps and COM position during walking that helps us create the database to optimize the gait pattern of exoskeleton robot. The result as shown in below video indicated the more clear view of the geometry in three parameters. We will implement the real-time result into the control window that benefits the training people to have more information to teach the patient better use of exoskeleton robot.
Video For Real Time Performance of Balance
bottom of page